Scientists design robot hand that can grasp objects based on wrist movement
Experts from the University of Cambridge said the hand utilises ‘passive’ movement.
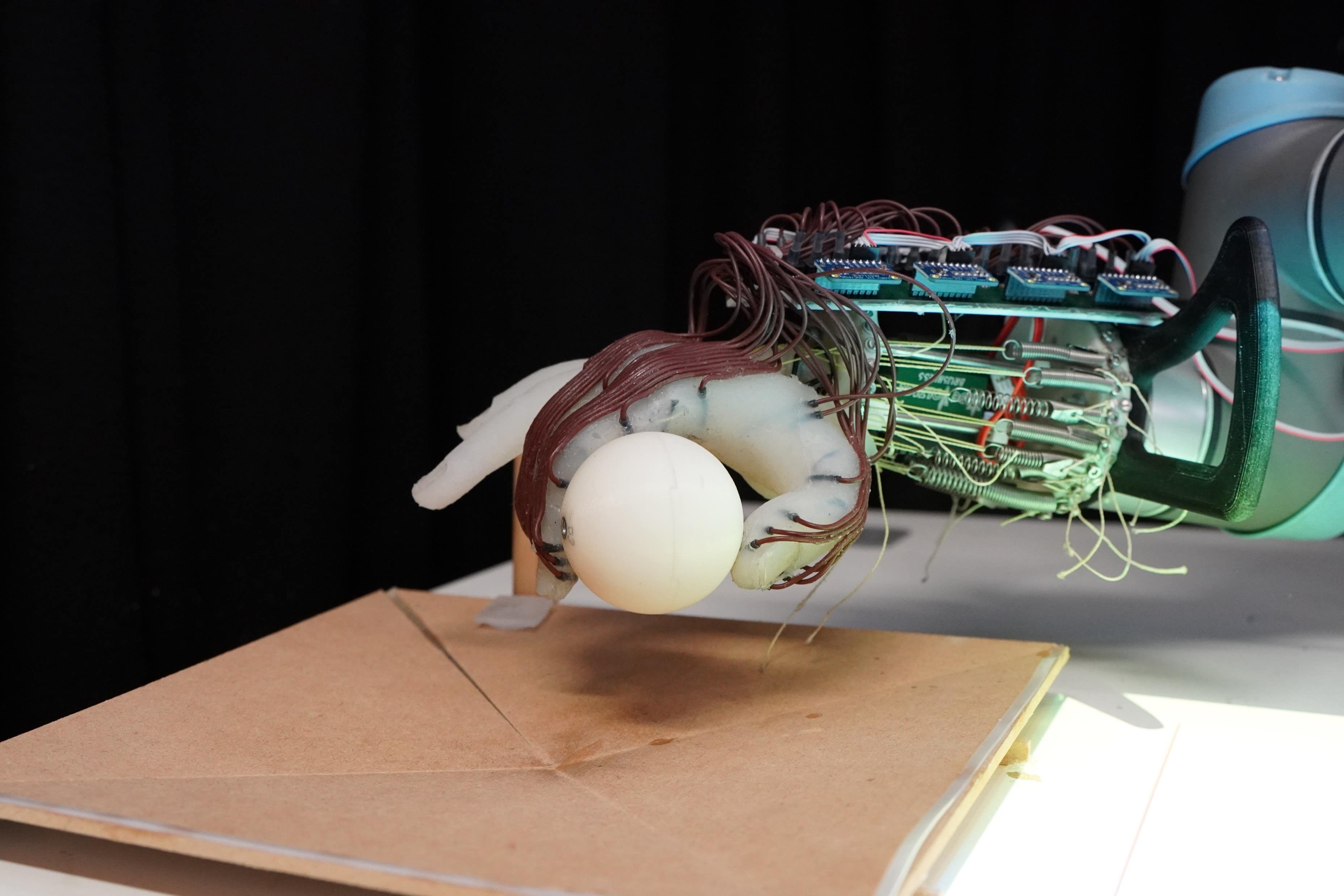
Scientists have designed a robotic hand that can grasp objects – and not drop them – using just the movement of its wrist and the feeling in its “skin”.
Researchers from the University of Cambridge said that this mechanical hand does not require its fingers to move independently and utilises “passive” movement using wrists, making their technology low-cost as well as energy-efficient.
The robot hand was also able to predict whether it could drop the objects it grasped by using the information provided by the sensors placed on it.
The experts said their findings, published in the journal Advanced Intelligent Systems, could be used in the development of low-cost robotics where mechanical hands can learn to grasp a wide range of objects while being capable of natural movement.
The scientists said that the human hand is highly complex, which means recreating all of its capabilities in a robot can be a massive research challenge.
For example, the experts said, humans instinctively know how much force to use when picking up an egg – but for a robot, this is a challenge.
If the robot applies too much force, the egg could break, and if there is not enough pressure, it could drop the egg.
The scientists created a 3D-printed robotic hand implanted with sensors that could enable the hand to “sense” what it was touching.
This hand was only capable of passive, wrist-based movement and the individual fingers were not fully motorised.
More than 1,200 tests were carried out using the robotic hand.
The hand was initially trained using small 3D-printed plastic balls, after which it then attempted to grasp different objects – including a peach, a computer mouse, and a roll of bubble wrap.
The robotic hand was able to successfully grasp 11 of 14 objects, the researchers said.
Dr Thomas George-Thuruthel, formerly of the University of Cambridge who is now a lecturer in Robotics and AI at the University College London’s Department of Computer Science, said: “The sensors, which are sort of like the robot’s skin, measure the pressure being applied to the object.
“We can’t say exactly what information the robot is getting, but it can theoretically estimate where the object has been grasped and with how much force.
“The hand is very simple, but it can pick up a lot of objects with the same strategy.”
Fumiya Iida, professor of robotics at the University of Cambridge’s Department of Engineering, added: “The big advantage of this design is the range of motion we can get without using any actuators.
“We want to simplify the hand as much as possible.
“We can get lots of good information and a high degree of control without any actuators, so that when we do add them, we’ll get more complex behaviour in a more efficient package.”
The research was funded by UK Research and Innovation (UKRI), and software design company Arm Ltd.